Links to selected talks
General Information
What?
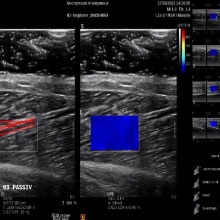
This year’s project investigates an automated ultrasound probe alignment for shear wave elastography. An observer shall estimate the muscle fiber angle from ultrasound images, which are then used to automatically actuate the ultrasound probe and align the probe parallel to the muscle fibers.
When?
Dates: August 15 - August 19, 2022
Time: 9am - 5pm CEST
Closing Ceremony: August 24, 2022
Who?
Left to right on the picture above:
- Elsa Bunz Write e-mail
- Manuela Zimmer Write e-mail
- Tobias Ehring Write e-mail
- Annika Kienzlen Write e-mail
- Benedikt Kaiser Write e-mail
- Manuel Zürn Write e-mail
- Henning Schlüter Write e-mail
Coordinator: Simona Galliani Write e-mail
Where?
This year the summer school took place on Campus Vaihingen of the University of Stuttgart at two different locations:
- The Neuromechanics Lab (NML), Room U.214, Institute for Parallel and Distributed Systems, Universtiätstrasse 38 https://www.simtech.uni-stuttgart.de/exc/research/research-facilities/neuromechanics-lab/
- Seminar room V9.2.253/255, Institute for Systems Theory and Automatic Control, Pfaffenwaldring 9 https://www.iew.uni-stuttgart.de/
- SimTech Seminar Room PWR-0.009 , Pfaffenwaldring 5a https://www.simtech.uni-stuttgart.de/)
Agenda
Creating a shared opinion on the goal of the project is key to start the interdisciplinary work on a joint, interdisciplinary demonstrator project. After that, the team split into subgroups for an efficient preparation of the subtopics.
The second day of the demonstrator project focused on the commissioning of the hardware and software. First individual components of the sub-teams were finished, which enabled further connections.
Connecting the developed components led to a first running automated probe alignment. Although several features to log relevant parameters were missing up to this point, this was a major milestone of the demonstrator project reinforced by the definition of an experimental protocol.
The pilot study provided a lot of information on facilitating the subsequent implementation of the study. This also led to a software and hardware iteration, which activated the sub-teams once again.
On the last day of the summer school, the team focused on recording measurements of multiple test subjects. A further evaluation has to show the quality of the measurements taken in order to evaluate if the number of test subjects is sufficient for evaluation.
Along with the presentation on the project results, it followed a live hardware demonstration session where the graduate students could show to the audience the functioning built robot.A fruitful discussion ended the program of the day examining future steps in the project development.
Contact

Sina Schorndorfer
Coordinator GRK 2198
[Image: Universität Stuttgart]

Oliver Röhrle
Univ.-Prof.PI and Spokesperson GRK 2198
[Image: Universität Stuttgart]