The main aim of this focus area is the scientific evaluation and design of new algorithms to generate motions of robot kinematics, which interact with soft tissues. To do so, new concepts and algorithms need to be developed to measure and analyse sensor data of the robot or data originating from the (biological) tissue to generate new set points for the actuators. In close collaboration with Reseach Area A, biological principles of motion generation are analysed to develop algorithms for online-parameterisation during operation of the robot. These designed algorithms have to be implementable in existing control architectures or in the new control architecture developed in Research Area B. The integration in technical environments needs these algorithms to feature real-time behaviour. Here, real-time means a deterministic behaviour with calculation times in the order of milliseconds.
Research Projects @ University of Stuttgart
The main aim of this biomechanical project will be to develop a standardised test procedure to quantitatively compare different actuation concepts for motion generation on a fair basis. This shall include the sensor-actuator integration, the learning of new motion, and the storage of motion patterns or programs. Based on a recently published approach of measuring the processed information [SS3] several other criteria have to be taken into account, e.g. mechanical efficiency, power output, etc. Typical movement tasks will be analysed, with periodic and aperiodic movements among them. A multi-dimensional analysis based on the developed procedure and proposed quantification criteria will finally enable researchers to compare different concepts of motion generation and their benefits for a certain movement task. This will greatly benefit the mechanical and control design of robotic devices assisting human motion.. (Prof. Schmitt, Jun.-Prof. Pott, Prof. P. Xu)
ProjectS-14/I (“Kinematics and Localisation of Soft Tissue Objects”) aimed to adapt localization techniques to estimate the pose and configuration of soft deformable objects. Based on the assumption that the deformation of a soft object can be locally discretized by modelling it as multiple interconnected rigid bodies with discrete degrees of freedom, a largely reduced order model should be obtained. The additional information about the deformation behaviour captured
within this multi-body model should be used to estimate the pose and orientation of a deformable object. (Supervisors: Jun.-Prof. Pott, Prof. Verl, Prof. P. Xu)
Research Projects @ University of Auckland
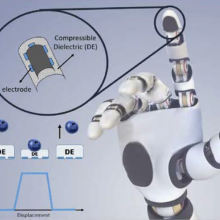
The aim of Project UoA-8/I is to develop soft proprioceptive feedback for robotic manipulators, in order to give robots the ability to sense their environment and interact safely with it. The project covers the investigation of soft actuators with integrated touch sensors for position detection, a distributed active skin for the very sensitive detection of contact forces, and soft end-effectors to enable grasping without squeezing, thus making it possible to handle very delicate objects. One of the key elements of the research project consists in the development of a very sensitive and compliant capacitive touch sensor, capable of measuring very small contact forces. (Supervisors: Dr Rosset, Prof. Anderson, Prof. Schmitt)
The overall aim of the project was to develop novel methods for reliably recording and analysis of high-density EMG signals from the arm. These methods should be able to capture and process large datasets comprising more than 100 channels for long periods of time. This information would ultimately be used to improve machine-human interfaces. (Supervisors: Prof. Cheng, Dr Paskaranandavadivel, Prof. Röhrle)
The arm hand system is the most dexterous human body part, allowing us to interact with the environment and execute dexterous tasks. Nowadays, conventional robot arms that make up the majority of existing robotic manipulators are designed for industrial purposes or for specific platforms. This project, Project UoA-7/I, focuses on the modelling, design and development of an adaptive, anthropomorphic robot arm hand system, inspired by the dexterity and sophistication of the human upper-arm, forearm and hand. This is carried out by following a bio-inspired approach combining soft robotic technologies and new materials with traditional mechanical designs. Thus, creating a hybrid system with reduced weight, increased performance and better operation in non-structured and dynamic environments. The goal is to analyse, model and develop a general purpose, compact, modular, lightweight and low cost anthropomorphic robot arm hand system for industrial and service robotics applications. (Supervisors: Dr Liarokapis, Prof. P. Xu, Prof. Verl)
Contact

Sina Schorndorfer
Coordinator GRK 2198
[Image: Universität Stuttgart]

Oliver Röhrle
Univ.-Prof.PI and Spokesperson GRK 2198
[Image: Universität Stuttgart]